| Planung Shapeoko MAX |
|
|
1 2 3
|
12.04.16 13:14
sleepwalka 
|
Planung Shapeoko MAX
Hallo zusammen,
ich lese hier jetzt schon eine Weile mit und verfolge die Entwicklung der Shapeoko.
Nun habe ich mich entschlossen, mir auch eine Fräse zuzulegen.
Aufgrund der höheren Steifigkeit und der besseren Aufrüstbarkeit (Vergrößerung des Bearbeitungsraums) habe ich mich für die Shapeoko MAX entschieden.
Im Moment habe ich leider nur eine Stellfläche von 90x90cm zur Verfügung. Auf dieser Fläche soll die Fräse inkl. Einhausung und Absaugung stehen.
Das Ziel ist eine Bearbeitungsfläche von mindestens 50x50cm.
Daher habe ich bezüglich der genauen Abmessungen ein paar Fragen:
- Welche Außenmaße ergeben sich bei einer Shapeoko MAX (bestenfalls bei innen- und außenliegenden Motoren) bei einer bestimmten Profillänge (v.a. in X-Richtung)
- Welche Bearbeitungsfläche ergibt sich bei bestimmten Profillängen (X- und Y-Richtung)?
- Ergibt sich bei gleichen Außenmaßen bei der Variante mit innen- oder außenliegenden Motoren der größere Bearbeitungsraum?
- Welche Höhe sollte ich mindestens für die Einhausung vorsehen (unter Berücksichtigung eines Absaugschlauches)?
Danke schonmal für eure Hilfe
Viele Grüße
|
|
|
|
12.04.16 21:18
crixnicht registriert
|
Re: Planung Shapeoko MAX
Ich habe mal Mass genommen:
Folgende Angaben gelten für die Shapeo-MAX (Beta) aus dem März. Diese Bleche sind inzwischen ausverkauft, entsprechend kann es sein daß die Angaben für die nächsten Bleche so nicht mehr gelten. Über eventuell geplante Änderungen kann ich keine Aussage treffen, das kann nur Ronald.
Nomenklatur:
X-Achse: Die obenliegende einzelne Achse auf dem der Laufwagen mit der Frässpindel fährt
Y-Achse: Doppelt ausgeführte Achsen die mit dem Rahmen verschraubt sind. Die X-Achse läuft rechts und links auf den Y-Achsen.
Z-Achse: Höhe (hierrüber fährt die Frässpindel rauf und runter in das Werkstück)
Ausgehend von einer gegebenen Länge der Makerside-Max Profile ergeben sich folgende ARBEITSBEREICHE:
X-Achse:
================
Motoren außenliegend:
--------------------------
-20 mm Rechts da die Laufrollen der X- und Y- Wagen kollidieren (das könnte in einer neueren Version ggf vermieden werden)
-20 mm Links da die Laufrollen der X- und Y- Wagen kollidieren (das könnte in einer neueren Version ggf vermieden werden)
-160 mm Motorblechbreite
( -6 mm) je Endschalter auf der Achse, kann innerhalb des Kollisionsschutzes von 20mm je Anschlag kompensiert werden
----------------------------------------------------------------------------------------------------------------------------
-200 mm zzgl. ggf. Endschalter
Bei Verwendung von Endschaltern gehen nochmal je ca. 6mm je Endanschlag mit Schalter verloren, da die Schalter ca. 6mm vor dem Anschlag umschalten. Das kann bei meiner Version aus dem März innerhalb der 20mm Kollisionsschutz kompensiert werden.
Motoren innenliegend:
--------------------------
-160 mm Motorblechbreite
( -6 mm) je Endschalter auf der Achse
----------------------------------------------------------------------------------------------------------------------------
-200 mm zzgl. ggf. Endschalter
Y-Achse:
================
-160mm Motorblechbreite
( -6 mm) je Endschalter auf der Achse
----------------------------------------------------------------------------------------------------------------------------
-160 mm zzgl. ggf. Endschalter
Der nutzbare Arbeitsbereich wird darüber hinaus ggf. durch eine Begrenzung des Außenraums eingeschränkt, da der Stepper nach hinten und die Frässpindel nach vorne über das Motorblech hinausragen!
Die Gesamtstärke des Laufwagens beträgt:
50mm NEMA23 xxx218
3mm Motorblech
51mm Distanzbolzen
3mm Motorblech
38mm Z-Laufwagen
fh Fräsenhalter
fs Frässpindel
Ausgehend von einer gegebenen Länge der Makerside-Max Profile ergeben sich folgende AUSSENMASSE:
X-Achse:
================
Motoren außenliegend:
--------------------------
+15mm Ende Achse bis Ende Rahmenblech
+98mm Arduino Halter
+45.5mm Überstand Motor (NEMA23 xxx218)
----------------------------------------------------------------------------------------------------------------------------
+158,5 mm zzgl. ggf. Sicherheitsabstand da sich die Motoren bewegen ;-)
Motoren innenliegend:
--------------------------
+120 mm Ende Achse bis Ende Rahmenblech
+ xx mm Arduino Halter (Montage unklar !!)
----------------------------------------------------------------------------------------------------------------------------
+120 mm zzgl. ggf. Arduinohalter und Sicherheitsabstand da sich die Motoren bewegen ;-)
Y-Achse:
================
+6mm Rahmenblechstärke
+8mm Zahnriemenbefestigung
+6mm Mutter Befestigung Rahmenblech (bei Verwendung der Zahnriemenspanner von Ronald (-ca. 20mm Arbeitsbereich zusätzlich)
+18mm Zahnriemenspanner (bei Verwendung der Zahnriemenspanner an der Aussenseite (Siehe mein Zusammenbau Thread)
+ darüber hinausgehende Tiefe des Z-Aufbaus (Berechnung siehe oben)
Von der Höhe her ist der Pully der Z-Achse bei 42cm. Dazu kommt dann noch der Anteil der Fräse am oberen Anschlag der Z-Achse sowie Platz für den Energieschlauch. Über den Daumen nicht wenigher als 50cm.
Ich hoffe das hilft mal zur Abschätzung ;-)
|
|
|
|
13.04.16 15:08
crixnicht registriert
|
Re: Planung Shapeoko MAX
Korrektur (Die Summe ist natürlich nicht 200):
X-Achse
Motoren innenliegend:
--------------------------
-160 mm Motorblechbreite
( -6 mm) je Endschalter auf der Achse
----------------------------------------------------------------------------------------------------------------------------
-160 mm zzgl. ggf. Endschalter
|
|
|
|
14.04.16 08:08
sleepwalka
|
Re: Planung Shapeoko MAX
Vielen Dank für deine Hilfe. Das hilft schon sehr weiter.
Ein paar Unklarheiten bleiben aber noch:
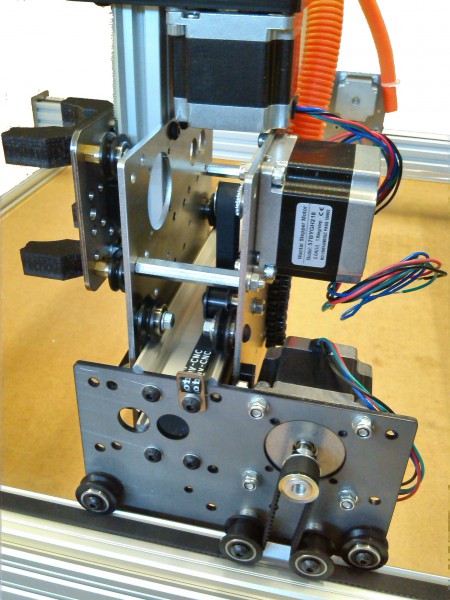
Auf diesem Bild aus dem Shop sieht man relativ gut, dass der Z-Aufbau nur nach vorne über die Motorbleche ragt. Nach hinten scheint das Motorblech die begrenzende Komponente zu sein (bzw. die Laufrolle), sodass man die Fräse in einer Einhausung fast ganz nach hinten schieben könnte (Platz für Zahnriemenbefestigung ist zu berücksichtigen). Allerdings wäre die Fräse dadurch wenn sie bei Y=0 steht ja nicht mehr über der Opferplatte, was den Bearbeitungsraum verkleinert.
Hast du den Laufwagen der X-Achse bewusst anders herum angebracht als auf dem Bild aus dem Shop? Für mich ist das auch aus Gründen der Kraftübertragung sinnvoller nicht nur weil die Fräse am vorderen Anschlag noch über der Grundfläche steht. Auf den Bildern sieht es aber so aus, als ob man dadurch Verfahrweg in X-Richtung verlieren würde.
@Ronald: Gibt es eine von dir als Konstrukteur bevorzugte Variante, welche mehr (Bauraum-)Vorteile verspricht als andere?
Mir ist auch noch nicht ganz klar, wo der Arduino befestigt wird. Kannst du da n Bild von deinem Aufbau machen?
Im Moment denke ich, dass innenliegende Motoren sinnvoller wären. Den Laufwagen würde ich aber so anbringen, dass die Motoren vorne sind (nicht wie auf dem Bild). Damit ergäben sich folgende Maße:
Arbeitsbereich X-Achse
Verlust bei innenliegenden Motoren: 160mm (Laufwagen) + 6mm (Endschalter) = 166mm (+ Verlust durch Kollision Laufwagen Z und innenliegende Motoren???)
Benötigt: 520mm (500mm + 1/2 Fräserdurchmesser + evtl. Befestigung Material)
-> Profillänge: 520mm+166mm = 686mm
Gesamtlänge Fräse X-Richtung
686mm + 120mm = 806mm (+Arduino Montage?)
Arbeitsbereich Y-Achse
Verlust bei innenliegenden Motoren: 160mm (Laufwagen) + 6mm (Endschalter) = 166mm
Benötigt: 540mm
-> Profillänge: 540mm+166mm = 706mm
Gesamtlänge Fräse Y-Richtung
Profil 706mm
Rahmenbleche 6mm
Zahnriemenspanner (außen) 18mm
Aufbau Z-Wagen (inkl. Fräse aus Fräskit) ~230mm (geschätzt) abzüglich 160mm Motorblechlänge = 70mm
____________________________________________________________________
Gesamtlänge Y-Richtung 800mm
Dann hab ich noch je 10cm für die Einhausung, dass sollte machbar sein... :)
|
|
|
|
14.04.16 15:36
crixnicht registriert
|
Re: Planung Shapeoko MAX
Hier mal ein Aufsichtbild meiner Fräse:
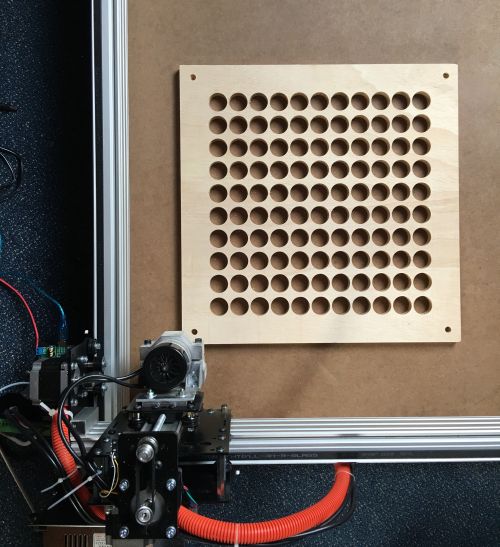
Bei mir ist der Ursprung (X=Y=0) unten links.
Ich habe den Aufbau mit Motoren Innenliegend begonnen, musste dann jedoch wegen zu kurzer Rahmenprofile (Siehe mein Aufbaudokumantation) auf außenliegende Motoren umschwenken. Ich habe die Motorbleche nur von rechts nach links gewechselt und nicht neu zusammengeschraubt. Dadurch ergaben sich die im Vergleich zu Ronalds Aufbau vorne liegenden Motoren auf der Y-Achse.
Bei Ronalds Aufbau überragen die Y-Motorbleche den ebenfalls nach hinten wegstehenden Stepper für die X-Achse, so dass da die Zahnriemenbefestigung der Y-Achsen den Aufbau in Y-0 Richtung begrenzen, und der Motor nicht übersteht.
Es gibt auch 2 Möglichkeiten die X-Achse an den Motorblechen zu befestigen die um ca. 2 cm auseinander liegen. Das ist auf den Foto's aus dem Shop gut zu erkennen. Man kann da etwas variieren. Ich habe die äußerste Möglichkeit gewählt da dann die 4-Kant Aluprofile besser passen die ich nutze um die Kollisien der Laufrollen zu verhindern.
Ich habe keine Umbauung, so daß es irrelevant ist ob da der Motor übersteht.
Grundsätzlich ergibt sich bei einer Umbauung der maximale Arbeitsbereich aus der Breite des Motorblechs und der Tiefe des Z-Aufbaus. Maximal wird der Arbeitsbereich wenn das Motorblech und der Z-Aufbau sich maximal überdecken.
Bei Ronalds Aufbau auf dem Bild im Shop sieht es so aus als wenn der Stepper nach hinten noch vor dem Motorblech endet, so dass dieser Abstand dem Arbeitsbereich verloren geht, da da noch Platz ist wenn das Motorblech bei Y=0 anschlägt.
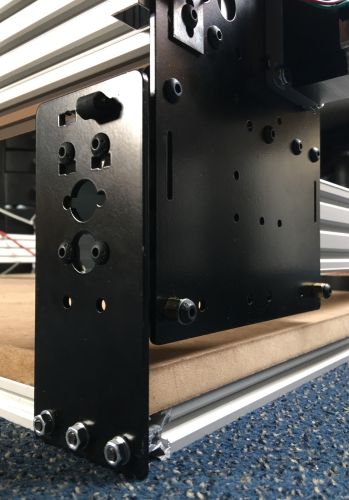
Ich habe ja die Motorenbleche an der Y-Achse außen und entsprechend das Blech das den Arduino trägt dort seitlich angeschraubt.
Bei innenliegenden Blechen die aus innenliegenden Motoren folgen, kann der Arduino Träger meiner Ansicht nach nur nach innen montiert werden, wo er eventuell den Fräser einschränken könnte. Man könnte ihn wohl auch nach aussen montieren, dabei würde aber vermutlich zu viel vom Blech durch das breitere MAX Profil verdeckt als dass man da den Arduino noch wie vorgesehen montieren könnte, die Montage eines Lüfters sehe ich in dem Fall auch als schwierig bis unmöglich an.
Moderator: Hier habe ich mit zwei 9-11mm Distanzrollen und einer M5x20mm Schrauben das Arduino-Blech weiter nach außen versetzt. Das ist immer abhängig davon, ob der Schrittmotor innen oder außen liegt. Bei außenliegenden Motoren ist keine Distanzrolle notwendig!
|
|
|
|
|
|
15.04.16 15:22
crixnicht registriert
|
Re: Planung Shapeoko MAX
Denk auch an den Platz für das bzw. die Netzteile.
Unter der Y-Achse ist recht wenig Platz, selbst bei Nutzung der oberen Position:
Wenn man Opferplatte und Rahmen nach hinten setzt, sind es ca. 44mm. Denke nicht dass das für eine Schleppkette reicht.
(Ergibt sich bei mir aus 8mm Luft + 16mm Opferplatte + 20mm Rahmenprofil)
Bei meiner 400W Brushless Spindel ist ein Brushless Controller dabei, der sich direkt per PWM vom GRBL Shield aus steuern lässt. Funktioniert 1A. (Im Gegensatz zur Fräsenhalterung aus dem China Kit. Die war ja komplett schief, der gelieferte Ersatz ist gekommen und ist nur halb so schief, was allerdings nicht wirklich hilft ) )
Der Controller braucht aber zusätzlich Platz. Ich habe ihn neben den Arduino auf das Blech geschraubt, so kriegt er noch etwas Luft vom Ventilator auf seinen Kühlkörper.
Die Spindel aus dem Shop kann man ja optional mit dem Geschwindigkeitsregler bestellen. Von den Bildern her ist das standard Regler der zigfach über die üblichen Vertriebskanäle aus China zu beziehen ist. Nach den dort verfügbaren Beschreibungen und Reviews lässt sich die Geschwindigkeit nur manuell über den Poti regeln. Der 3-polige unbeschriftete Connector ist wohl für ein externes Poti dass man statt des eingelöteten verwenden kann.
Genau kann das aber nur Ronald beantworten. Ist von meiner Seite nur ein educated guess.
@sleepwalka: Jupp gut erkannt. Wird ne Wordclock. Ist allerdings schon die 2. Auflage, (die erste Maske hab ich noch von Hand gebohrt, deswegen musste jetzt die Fräse her, sowas macht man maximal 1 x von Hand ;-)))
Ich habe vor auf NTP und Konfiguration via WLAN über ESP8266 umzustellen (vorher DCF77 und IR-FB) wenn Du da Erfahrung hast, gerne!
Moderator: Der mitgelieferte Drehzahlregler kann die Drehzahl mit einem Poti einstellen. Da das Poti aber zwischen 0-5V einstellt, kann auf dem mittleren Pin auch ein PWM-Signal mit 0 und 5 V gelegt werden. Dieses ist mit der GRBL-Version V0.9 möglich (D11)! Dazu ist über eine Controller Software S0 bis S1000 einzustellen! S500 hat dann ein Tastverhältnis von 50/50%! Mit M3 und M5 wird die Spindel dann ein und aus geschaltet!
|
|
|
|
15.04.16 16:06
crixnicht registriert
|
Re: Planung Shapeoko MAX
Nachtrag: die 44mm gelten bis zur Unterkante der Motorplatte. Wenn man die Schleppkette etwas weiter hinten plaziert, hat man natürlich noch den knappen Durchmesser der Laufrollen extra bis zur Unterkante des Makerslide-MAX Profil's.
Aber auch das ist vermutlich noch knapp für eine Schleppkette?
|
|
|
|
15.04.16 18:30
sleepwalka
|
Re: Planung Shapeoko MAX
Wenn man dieses Kabel
https://www.conrad.de/de/schleppkettenle...re-1152156.html
mit dieser Energiekette
http://www.igus.de/iPro/iPro_01_0002_000...m?c=DE&l=de
kombiniert würde es gehen. Die Energiekette hat eine lichte Höhe von 40mm...
Man würde in die 30mm breite Variante der Energiekette vier 4-adrige Kabel für die Motoren unterbringen + noch ein Kabel mit zwei Adern für die Spindel.
Ist dann zwar sehr auf Kante genäht, würde aber perfekt unter die Y-Achse passen...
Wenn man geschirmte Kabel nehmen müsste platzt mein Plan ;)
Muss aber nochmal schauen, ob ich ne passendere Schleppkette finde.
Würde den Arduino dann außerhalb der Umhausung in einem Kästchen mit Not-Aus usw. platzieren
@crix
Ne, da kann ich dir net wirklich weiterhelfen. Hätte dir eher bei mechanischen Lösungen und bei der Beschaffung von z.B. einer Frontplatte helfen können. Aber wenn du das alles schon hinter dir hast, weißt du ja was zu tun ist :)
Ist deine Spindel wirklich so leise, wie in deinem Video?
Ich mach mir grad Gedanken, ob ich die Einhausung aufwändiger dämmen soll oder ob ichs mit ~20mm MDF Platten und ein bisschen Entkopplung mit Gummimatten gut sein lasse. Die Fräse wird vorerst in der Wohnung untergebracht...
Zuletzt bearbeitet am 15.04.16 18:31
|
|
|
|
17.04.16 13:32
crixnicht registriert
|
Re: Planung Shapeoko MAX
Die Spindel ist extrem leise, das Video lügt nicht :-)
Laut wird das ganze wenn man mit höheren als den empfohlenen Vorschüben arbeitet. Dann fängt die ganze Fräse an zu vibrieren und das spürt man dann auch im Boden.
Ich fräse grad (Sonntag) ohne Umhausung in der Mietswohnung mit den von easel empfohlenen 760 mm/min bei 0.7mm Zustellung. Das ist kein Problem.
Ich habe auch schon mit 4mm Zustellung bei 760 mm/min gefräst. Das kann man dann eher Sonntags nicht bringen ....
|
|
|
|
|
|
1 2 3
|

 Anmelden
Anmelden






